焊縫自動跟蹤技術概述
焊縫自動跟蹤系統一般有傳感器、控制器、執行機構三大部分組成,常構成一個閉環反饋系統。焊縫自動跟蹤系統是一定程度上的智能控制系統,要提高焊縫跟蹤系統的精度,除了在軟件方面的改進之外,還需要以上三大部分硬件方面的提升:
1、自動跟蹤傳感器方面。設計更加靈敏的傳感器,使系統具有更強的實時性。
2、控制器方面。設計功能強、成本低的控制器硬件,設計更加合理有效的協調各自由度運動控制的原理與方法。
3、執行機構方面。需要設計出更為合理的自由度配置形式和結構,以保證機構更為輕便、運動靈活。
焊縫跟蹤傳感器的發展狀況
激光焊縫跟蹤器的實現
機械臂的移動需要同時考慮傳感器的識別范圍和焊槍的有效跟蹤,延時跟蹤的具體步驟為
(1)將激光光條手動調節到焊縫入口附近;
(2)自動跟蹤開始,識別焊縫入口,激光光條向焊縫移動,識別第一個有效焊縫點,計算在當前旋轉姿態下為是焊槍接觸焊縫機械臂末端因到位置P 1;
(3)開辟隊列,隊列長度由需要跟蹤精度決定,在一定范圍內隊列越長跟蹤精度越高,讀取當前機械臂末端位置 Pn,在P1,.,Pn之間線性插值,存入隊列中。
(4)隊列第一個位置信息出隊,控制機械臂以末端旋轉位姿R6到達該位置,機械臂輸入坐標為Pe'=Pi+R6*t7;
(5)讀取當前焊縫圖片,提取焊縫特征點,經過計算得到該焊縫點在機械臂基坐標系下的坐標,然后入隊,若焊縫提取失敗則跳到(7)。
(6)根據焊縫特征點在圖像中的位置,調整機械臂末端旋轉位姿R6 ,具體方法為如果焊縫點在圖像中處于整體偏左,則機械臂末端旋轉位姿R 6逆時針運動一點,整體偏右則機械臂末端旋轉位姿R6 順時針運動一點。
(7)判斷隊列是否為空,不為空則轉到(4),空則轉到(8);
(8)焊縫跟蹤結束。
激光焊縫跟蹤也叫激光跟蹤或者光學跟蹤或者視覺焊縫跟蹤,使用激光三角測量原理,輔之以軟件算法處理擬合焊縫圖像與標定焊縫軌跡對比傳遞偏移量給到機器人實現實時跟蹤。激光跟蹤可以在專機和機器人使用,創想智控研發的激光跟蹤已經適配庫卡、ABB、發那科、安川、川崎等進口機器人品牌在集裝箱、鋼結構、自卸車、鏟斗中已有應用案例,實現定制研發和針對軍工,航天等復雜結構件進行開發實現自動焊接跟蹤。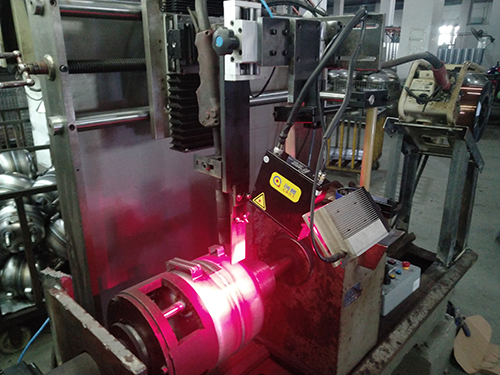
解決問題
可一鍵解決如檢測范圍、檢測能力以及焊接過程中的常見問題;
可實現實時糾正焊縫偏差,智能實時跟蹤,引導焊槍自動焊接;
可解決焊縫偏差帶來的問題,確保焊縫成型美觀牢固。